华为高分辨成像雷达首发!使能高阶自动驾驶
[中国,上海,4月18日] 在2021年上海国际车展前夕,华为首次公开发布高分辨成像雷达产品和解决方案。华为融合感知产品部Radar & Camera总经理苗立靖就成像雷达3大核心能力,大阵列高分辨、大视野无模糊、4D高密点云和6大价值场景进行了全面的阐述。

相比激光雷达和摄像头,毫米波雷达具备极佳的测速能力、极佳的天气和光线鲁棒性(不受光线和雨雪天气影响),以及非视距被遮挡目标的独特探测能力。高分辨4D成像雷达在继承这些优势的同时,大幅提升分辨率,目标检测的置信度和检测范围(如距离和FOV),同时进化出像激光雷达一样的高密度点云,可带来丰富的感知增强应用,比如环境刻画,雷达构图,定位等,也可以通过多雷达的点云级融合,更好实现车周的360°检测。4D成像雷达必然会带来革命性的变化,成为高阶自动驾驶下一个必备武器。
华为毫米波雷达团队从2017年开始技术预研,用了2年时间,完成基础技术与能力的验证,完成技术验证和市场分析,确定第一代产品方向;2019年正式启动商用产品开发,包括中距和短距两个产品。去年完成第一次夏测和冬测,预计今年实现首项目SOP交付,2022~2023年将有更多项目量产,有希望快速实现年发货超百万。
在第一代雷达研发的同时,华为也看到自动驾驶或者说体验意义上的自动驾驶逐步走向量产。它带来了传感器的全新要求,辅助驾驶更多关注人车检测,自动驾驶要求全目标检测,而且要求高置信度,比如准确检测100米外障碍物。自动驾驶对感知覆盖的要求也大幅提升,纵向300米车辆,横向120°,同时为支持自动变道功能,车周360°都需要连续跟踪。
自动驾驶诉求总结下来就是四”全”,全目标,全覆盖,全工况和全天候,这就是理想传感器目标。
全目标:原来辅助驾驶的检测目标更多是车和人,自动驾驶要求全面检测路面或路边静止物。
全覆盖:纵向检测需要覆盖200米以外的车辆,横向的FOV检测也从90°提升到120°。为了实现安全自动变道等高级功能,车周身的360°目标都需要连续检测。
全工况:原来辅助驾驶更多考虑的是高速场景,当前自动驾驶由高速开始,逐步考虑城区扩展,同时一些极限、特殊场景也需成为感知能力范围,如拥塞、事故。
全天候:为了保证体验连续性,需要考虑不同天气和不同光线条件等复杂环境下,传感器仍具备可靠的感知能力。

面向这些诉求,摄像头率先演进,2MP升级到8MP,搭载数量每车5个到10个以上,高线数激光雷达也陆续成为主流量产车型的必备选择。剩下一个命题是毫米波将如何演进?

华为认为毫米波的下一步演进就是高分辨4D成像雷达,4D是指检测目标的4个维度,包括它的速度、距离、水平角度和垂直角度,传统雷达水平分辨能力不足,不支持垂直分辨,导致看不清,看不准。近年来自动驾驶事故中,感知不足是重要原因之一,比如没有有效识别静止车辆或事故车辆,隔离桩或护栏判断不准导致严重事故。
4D成像雷达大幅提升水平和垂直的角度测量能力,满足全目标,全覆盖和多工况的感知要求,逐步接近理想传感器目标,将和摄像头、激光雷达形成有效融合和冗余,打造满足自动驾驶要求的感知铁三角。
华为正式发布的下一代高分辨4D成像雷达,在3个方面实现能力的断代性提升:
第一个是大阵列高分辨。提高角度分辨,单纯依靠软件算法虽有部分优化方案,但华为认为更普适、更可靠的方式是增加天线阵列,加大天线口径,实现能力的跨越式提升。华为高分辨4D成像雷达采用12个发射通道,24接收通道,比常规毫米波3发4收的天线配置,整整提升了24倍,比业界典型成像雷达多50%接收通道,这是短期可量产的最大天线配置成像雷达。通过这样的超强硬件配置,水平角分辨率将从传统的3~4°,提升到1°,垂直高度分辨也从无到有,达到2°,这是天线能力实口径,软件优化还有进步空间。更重要是角测量精度也将从0.2°度提升到0.1°,对城区拥堵等密集场景非常有意义。

第二是大视场无模糊。水平视场从90°提升到120°,垂直视场从18°提升到30°,纵向探测距离从200米提升到300米以上。覆盖范围(距离+FOV)的扩展,一方面由自动驾驶功能驱动,另一方面来自多传感器融合冗余需求。例如,8MP摄像头采用30°+120°两个模组,实现远距30°内,大于500米车辆感知,近距支持120°内的200米覆盖。
通过大阵列设计,一个4D成像雷达可支持远近两种波形,兼顾远距和近距广角覆盖,长波形支持18°内超过300米覆盖,短波形实现120°内的150米覆盖,完全满足十字路口等城区场景要求,将对齐摄像头和激光雷达目标;
还要特别强调的是无模糊能力,传统雷达角度测量有多义性,就是一个目标可能计算出多个角度方向,需要进一步算法消除。华为4D成像雷达通过天线排布和信号处理优化,实现角度无模糊,准确识别目标,在人车混流、十字路口的多目标场景非常有用,可以避免角度模糊结果和真实反射混到一起,减少虚警,形成高置信度点云,并简化后端点云跟踪算法,避免多帧消除的处理时延
第三是4D高密点云。作为综合能力提升的结果,毫米波雷达也可以像激光雷达一样支持高密度点云。成像雷达的4D点云,也就是速度,距离,水平角度和垂直高度,相比激光雷达点云,多一个速度维度,可以有更多的维度对目标物体进行诠释;相比传统雷达,4D点云带来丰富的感知增强应用,比如环境刻画,雷达构图,定位等,也可以通过多雷达的点云级融合,更好实现车周的360°检测,这将会带来革命性的变化。比如利用MDC的大算力资源,引入AI方案增强目标跟踪;也可以基于点云,实现分米级精度的构图与定位。需要补充的是,因为毫米波的天气和光线鲁棒性非常好,基于毫米波的构图与定位将有非常大的应用空间。
另外,点云处理意味需要点云采集及域控软件配套,华为在这方面会有非常强的合作开发能力。华为4D成像雷达的开发团队主体在中国,数据分析和采集,中国场景会优化的更充分,在与OEM域控软件对接中,实现高效联合开发。
对于4D成像雷达的组网,华为灵活支持3种架构:对接小算力域控,雷达仅输出目标;对接大算力域控,所有跟踪处理在域控完成,仅输出4D点云;或点云+目标混合输出模式
在用户价值上,华为提炼总结了4D成像雷达的6大场景价值
1.高速巡航场景:要保障高速巡航的行车体验,主要指标是看的更远更清,避免急刹。典型场景是前方拥塞时,130kph下舒适性刹停,需要判断220米外前车是处于本车道还是邻车道。
4D成像雷达支持1°水平分辨,300米的车辆检测跟踪,这样即便220米外两辆车完全同速同距,位于相邻车道,也可以通过角度分辨出来
2.安全避障:无论自动驾驶还是辅助驾驶,安全仍是首要问题,对传感器最迫切诉求是静止障碍物检测,这是传统毫米波的短板。4D成像雷达点云密度提升10倍,大幅提升静止目标检测置信度,小障碍物检测也有很好表现。例如锥桶探测距离达到110米,也可实现护栏静止车分辨
支持静止物检测,就必须有效区别地面静止物或悬空物,比如不能把龙门架上报为障碍物。成像雷达通过2°垂直分辨,极限场景可通过高度测量,分辨220米外龙门架和下方静止车,保证不会被误判障碍物
3.城区巡航:高阶自动驾驶中,城区场景是最难的,主要挑战是大量横向运动检测,和多目标的复杂工况,如人车混行场景(近端行人,车辆L型);人/自行车等VRU和公交的大小目标并行场景;被遮挡场景,施工区护栏变窄场景等,成像雷达大视场无模糊能力可以很好地匹配城区要求。
此外测角精度和高动态能力也非常重要。测角精度从0.2°提升到0.1°,50米横向测量误差将小于10cm,100米测量误差小于20cm,这对城区场景,狭窄区域可通行判断非常有用。同时,成像雷达具备更高动态范围,对公交车和行人并排,大小目标场景也可准确检测
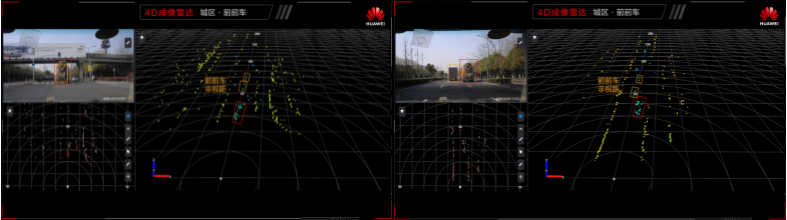
4.非视距前前车检测:被遮挡或部分被遮挡目标感知是毫米波独特能力,就是电磁波信号从车辆底盘下方传播,实现非视距目标探测。相对传统雷达,因为4D成像雷达的多径处理能力更强,典型场景前前车的探测能力将提升100%以上。
4D成像雷达可以看到前车,前前车,和前前前车,甚至可以看到前前车的大致底盘轮廓,通过对前前车的感知,比如有急减速,可提前预判前车动作,减少连环追尾风险。
5.环境刻画:4D点云有很多应用,环境刻画是最典型的一个
通过150米以上的护栏探测,有效确定道路边界;
通过高精度测高,准确判断地面、地上、空中等不同高度目标,勾勒3D道路拓扑结构;
最后通过人车障碍物等点云处理,可以生成10cm精度的可通行区域,形成完全匹敌激光雷达和摄像头的环境刻画
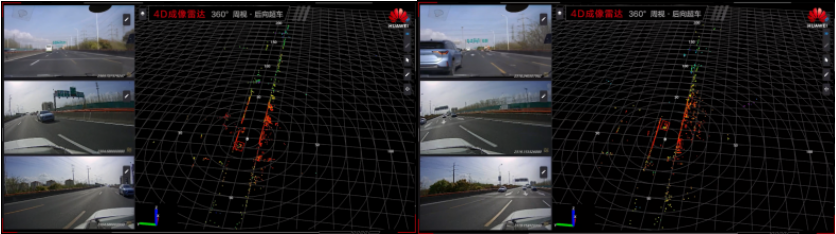
6.360°全方位检测:最后一点是也是4D点云应用,就是全车多雷达的点云集中在域控上处理,实现从“目标级融合”到“检测级融合”,融合后点云对360°车辆连续跟踪非常有用,比如后向超车场景,从迫近到超越,融合点云整个过程是连续的,确保跟踪过程平稳,最大避免跟踪ID跳变。 这样Cut-in检测或意图判断也可以提前进行,有助于解决近距Cut-in问题。
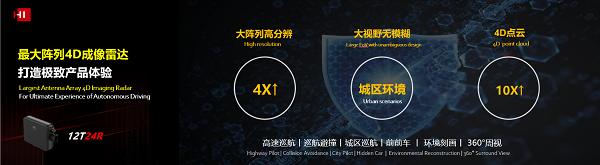
综上所述,华为高分辨4D成像雷达总结为3大能力,6大价值:
3大能力:4倍分辨率提升,大视场无模糊,4D高密点云。
6大价值:高速巡航超远感知,高速巡航避障,城区多目标复杂场景可用,非视距感知,环境刻画,多雷达点云360°融合
正是有着如此之多的独特优势和需求驱动,华为相信,成像雷达必然会成为下一个高阶自动驾驶的必备武器,和高线数激光雷达,高清摄像头一起,使能高阶自动驾驶。
免责声明:本文仅代表作者个人观点,与中创网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。